

日本护理机器人踏上征途

期待马达和电池的改进
(2)的以用户的佩戴或携带为前提的小型轻量化,特别重要的技术之一是马达。实际上,在开发出的众多护理机器人中,马达成为在体积和重量上占相当比例部件的情况不在少数。
从本田推进开发的辅助腿脚不便者步行的装置“节律步行辅助器”历代的试制品也可以看出,一直以来的改进重点之一就是马达。初期试制品呈圆筒形凸出的马达非常碍事,利用者走路时一摆手就会碰到。为此,该公司新开发了扁平形状的马达(无刷DC马达)。与重达15kg以上的初期品相比,最新试制品将重量减轻到了2.4kg(图5)。
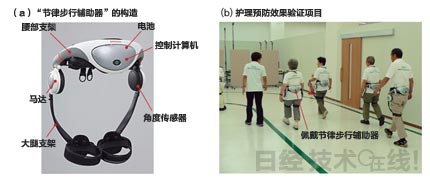 |
| 图5:开始在现场验证 本田开发的“节律步行辅助器”(a)。日本国立长寿医疗健康中心于2012年8月底启动了验证节律步行辅助器护理预防效果的项目(b)。 |
但本田认为还需要进一步改良马达。因为“个头不高的女性佩戴时,手有时还是会碰到马达”(该公司基础技术研究中心第2研究室第1部主任研究员芦原淳)。该公司称,将通过改进马达内部的部件等,将其进一步小型化。
另一方面,与这种小型轻量化相反的是电池的驱动时间。与工业机器人不同,多为移动中使用的护理机器人几乎都要用电池驱动。然而,小型轻量化和长时间电池驱动,目前是尚不能同时满足的技术之一。开发护理机器人的某知名企业负责人表示,“如果听说有谁说开发出了新电池,我会立即飞奔过去”。
日本国立长寿医疗研究中心从2012年8月开始,利用本田的节律步行辅助器,在爱知县大府市针对因高龄而腿脚力弱的老年人实施了护理预防效果验证(图5(b))。该中心老年学及社会科学研究中心自立支援开发研究部自立支援系统开发室室长岛田裕之,从利用者的角度出发,认为“目前的2小时驱动时间太短。要在白天持续使用,需要6~8小时的驱动时间”。今后,要求电子业界开发这种能满足现场需求的电池及低耗电量化等技术。
推进软件的标准化
要实现(3)的低成本,当然十分需要各种硬件的改良。同时,为众多企业提供机器人开发环境的软件技术也不可或缺。
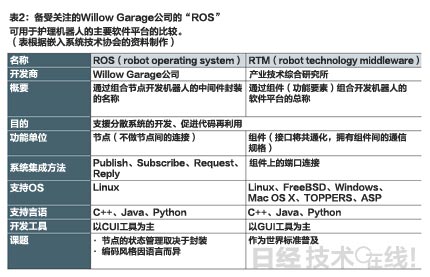
在这一点上,最近由美国谷歌公司原软件设计人员创立的公司美国Willow Garage突然受到了关注。该公司开发出了称为“ROS(robot operating system)”的软件平台,从2009年就开始了提供β版(表2)。ROS是由节点组合来开发机器人的中间件,也包含OS。
 |
专门研究软件开发的奈良先端科学技术大学院大学信息科学研究科副教授柴田智广,对ROS充满期待,他说“今后这一情况将变成现实,我们将要进入一个谁都能利用ROS平台开发护理机器人等应用的时代”(图6)。
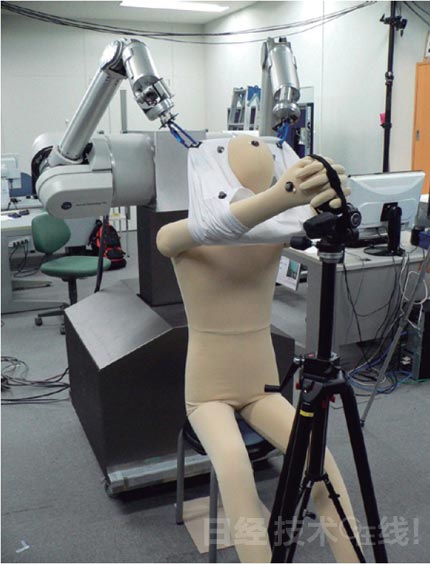 |
| 图6:致力于应用开发 奈良先端科学技术大学院大学2011年11月发布的穿衣机器人。是为成为应用软件开发平台而开发的。 |
除此之外,作为能提供与ROS相同环境的软件平台,还有日本产业技术综合研究所开发的“RTM(robot technology middleware)”(表2)。上述ROS和RTM虽是属于中间件的软件,但已出现了将更低一级(比OS低一级)、可直接控制硬件的部分标准化的动向。那就是日本嵌入系统技术协会(JASA)制定的“OpenEL(embedded libraries)”。其以在OS的元器件驱动内使用为前提,“即使不清楚OS的API,也能利用OS控制传感器及马达等”(JASA技术本部、应用技术调查委员会平台研究会委员长中村宪一)。JASA表示,正在以使OpenEL成为源于日本的全球标准为目的推进着相关活动。
争取2013年度确立安全标准
护理机器人适用护理保险的举措和要素技术开发都在加速。但要全面扩大市场,还有不可缺少的要素。那就是,旨在使护理机器人融入社会的周边基础设施建设(图7)。例如,安全性和可靠性的标准制定以及导入现场的环境建设,等等。如果这些基础设施不完善,那么辛辛苦苦开发出来的“技术”必然不能得其所用。
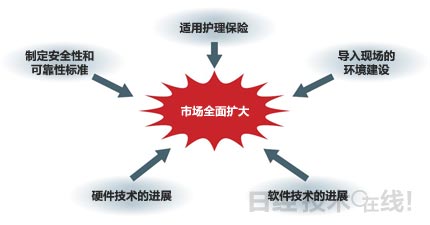 |
| 图7:市场全面扩大所需的各种条件 护理机器人市场要全面扩大需要很多条件。除护理保险的适用及要素技术开发的进展外,制定安全性和可靠性标准并建设导入现场的环境也不可缺少。 |
其中,许多企业一致认为,安全性和可靠性标准是“关乎是否决定实用化等经营判断的重大课题”。例如,尽管不是护理机器人,但由美国iRobot公司的“Roomba”开辟了市场的吸尘器机器人,松下也早就完成了开发。但据说在公司内做风险评估的结果是放弃了上市。原因是,与人共存的机器人的相关安全便准未制定,因此无法判断应该对安全性有多高的要求注1)。
注1)引自松下在2012年1月31日举行的“第12届大阪大学医工信息合作研讨会”演讲上的发言。
在这种情况下,出现了可能会成为护理机器人安全性和可靠性相关依据之一的动向。那就是新能源产业技术综合开发机构(NEDO)与相关企业共同实施的“生活支援机器人实用化项目”(2009~2013年度)。
该项目设置了可实际对机器人实施评价的设施“生活支援机器人安全验证中心”,并在开发安全性等的试验技术和验证方法(图8)。并计划基于此,在项目的最终年度2013年度制定出如何验证安全性等标准。据称,打算与国际标准化组织(ISO)预定2013年正式发行的生活支援机器人安全性相关国际标准“ISO13482”联动。“项目结束后,安全性相关的障碍应该就能消除了”(NEDO技术开发推进部、技术开发策划课课长代理(机器人推进负责人)真野敦史)。
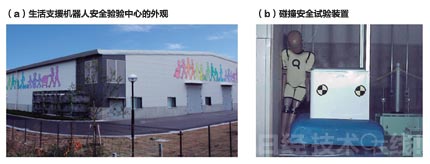 |
| 图8:推进旨在验证安全性的环境建设 茨城县筑波市的生活支援机器人安全验证中心(a)。备有验证护理机器人等的安全所需的各种试验设备。(b)是确认机器人与人发生碰撞时安全性的装置。 |
只开发机器人不行
另一方面,导入现场的环境建设问题目前还没有找到解决的方向。
从2010年度开始向护理设施等出租多台护理机器人,对机器人在现场的有效性等进行评测的“护理机器人普及模式业务”推进团体——神奈川福利服务振兴会护理机器人推进室室长关口史郎说,“很显然,单单向护理现场提供硬件(机器人)是很难普及的。还必须准备机器人使用相关的指南,构筑可灵活操作机器人的人才培养体制”。
为解决上述问题,日生基础研究所社会研究部门副主任研究员青山正治认为,“需要建立一个组织,把提供机器人的企业和利用机器人的护理现场等联系起来”。即应把供需两方分别拥有的不同技术经验作集中管理。此类呼声到处都有。
开发电动轮椅(移动用机器人)“RODEM”的风险企业Tmsuk公司代表董事兼CEO高本阳一表示,“我们这样的小企业也收到了很多机器人工学专业的海外学生的简历。他们在海外好像没有用武之地”。
这也显示出了日本机器人的先进性。但如果就此停步,则护理机器人这个拥有巨大潜力的市场或许会被海外企业全盘夺走。要在最先迎来超高龄化时代的日本,开发出能走向全世界的护理机器人技术并构筑其普及模式,就需要开发现场、护理现场以及政府机构携手行动。