

日本护理机器人踏上征途

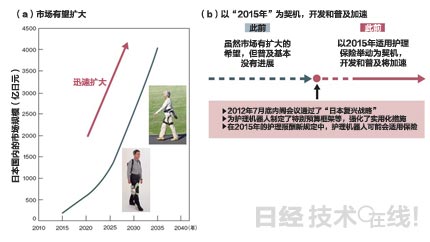 |
| 图1:开发和普及开始加速 护理机器人市场在不久的将来将大幅扩大(a)。2012年7月底出台推动护理机器人实用化的强化措施后,开发和普及会进一步加速(b)。(图(a)根据经济产业省的资料制作) |
何谓护理机器人?这个词尚无严格的定义,一般是指为需要护理的人的身体功能和生活提供支援,或者为护理人员的工作提供支援的机器(表1)。作为众所周知的例子,有筑波大学研究生院教授、CYBERDYNE公司CEO山海嘉之等人开发的“ROBOT SUIT HAL”。
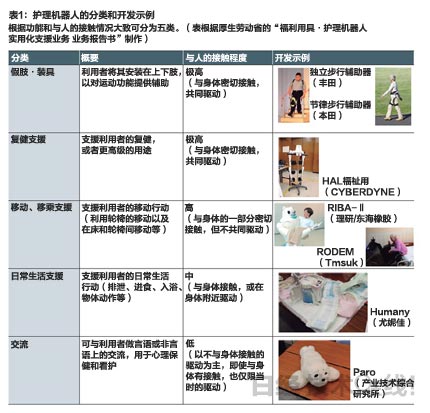 |
村田制作所于2012年9月宣布,该公司与福利器具制造商幸和制作所共同开发出了面向腰腿不便者的“电动步行助行车”(图2)。丰田2011年11月为行动不便者开发出了独立行走支援机器人等。2012年9月丰田又宣布面向手脚不便者开发出了可辅助其在家中独立生活的支援机器人。这些均属于护理机器人。
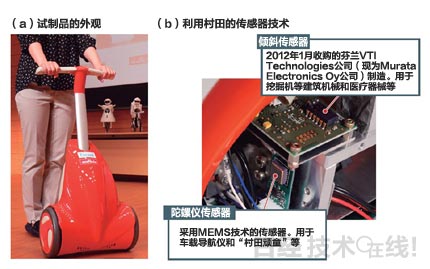 |
| 图2:村田制作所与福利用具厂商共同开发护理机器人 2012年9月底发布的电动步行助行车“KeePace”(a)。利用了村田制作所开发的自行车式机器人“村田顽童”和独轮车式机器人“村田婉童”使用的“不倒” 技术等(b)。 |
惠及电子企业
目前,这些护理机器人尚未全面普及。尽管如此,仍预测今后市场会迅速扩大的原因是,随着少子高龄化社会的到来,在需要护理的人不断增加的同时,护理人员会短缺。也就是说,存在明确的社会需求。“再过10年,老年人使用机器人独立行动将会成为自然现象”(丰田理事、伙伴机器人部的高木宗谷)。
众所周知,在不久的将来,这种情况将在以中国等亚洲地区为首的世界各地成为紧迫课题。也就是说,护理机器人不仅是开篇提到的日本国内,在全世界也有望形成规模巨大的市场。
如果护理机器人市场扩大,电子企业当然受益无穷。制造机器的企业自不必说,对机器上配备的电子部件、半导体和软件等的企业来说也有望成为一个巨大的市场。
机器人原本就是多种技术的集合体,由很多技术构成。例如,为实现“感知”的传感器技术、为实现“动作”的驱动技术和为实现“思考”的智能技术就是其中的代表性技术。
实际上,上述电动助行车,其开发关键也是村田制作所的传感器技术。该车使用陀螺仪传感器和倾斜传感器“感测”跌倒的危险性和坡道状态,从而实施防跌倒和坡道支援(力量支援)控制(图2(b))。这只不过是一个例子,护理机器人应该是各个电子企业均不容错过的市场。
20万日元的产品实际用2万日元即可导入
面向该护理机器人市场扩大,已吹来强劲的东风:2015年将实施的护理报酬新规定(3年实施一次)中,可能会对护理机器人适用护理保险。契机源于2012年7月底政府在内阁会议上通过的“日本复兴战略”。该战略将护理机器人的普及作为重点措施之一提出,同时明确将根据需要讨论其适用保险问题。
具体讨论将在今后进行,如果真的适用了护理保险,其影响会非常大。因为届时在护理设施等,只需负担一成的费用即可导入护理机器人。例如,村田制作所等开发的电动助行车考虑每辆定价10万~20万日元。这就意味着,实际花费1万~2万日元就能导入。
村田制作所常务执行董事、技术及事业开发本部本部长家木英治干劲十足地表示,“(适用保险提上日程),我们交了好运。我们会积极努力争取成为护理保险的适用对象”。要想成为保险适用对象,估计需要以往的市场业绩和评价。由此,我们打算在2013年度内开始通过幸和制作所销售监护仪,以获得用户等的反馈。
无疑,适用护理保险的动向将是此前基本未普及的护理机器人迈出全面普及第一步的关键。筑波大学研究生院的山海表示,“这样一来,事情终于朝着好的方向发展”。
有特殊的技术要点
不过,适用护理保险等措施,并不是单单为了减轻导入现场的费用负担。还有促进更多的企业加入护理机器人的开发,以推动技术的进一步发展的目的(图1(b))。
那么,护理机器人的开发今后需要哪些技术呢?如表1所示,护理机器人其实用途非常广泛,实现不同功能所需要的要素技术也迥然不同。因此,技术要点很难一概而论。
但护理机器人有一些共同特点。那就是“与人接触”。有直接安装在身体上与人体一同驱动的,也有在移动、移乘时等要与人体有一时接触的等,虽然“接触”程度各不相同,但都不可避免地要与人接触。这是其与生产汽车和电子部件的工厂现场使用的传统机器人、即所谓“工业机器人”大不相同之处。就是说,护理机器人有特殊的技术要点(图3)。
 |
| 图3:护理机器人需要新的要素技术 护理机器人除了工业机器人所需的技术外,还需要旨在“与人接触”的技术。 |
护理机器人具体有以下要点。(1)考虑到与人体物理性接触的柔性电子部件和材料,以及灵活驱动(马达控制)等技术;(2)不是放在一个地方固定不动,而是以用户佩戴或携带为前提的小型轻量化等技术;(3)不是在工厂。而以在设施和家中采用为前提的低成本化技术,等等。
更进一步地说,“与人接触”,其实还有“如果不清楚人的行动和反应机制的原理,就无法判断该令机器人如何进步”(丰田的高木)的意见。就是说,需要对人做广泛深入的观察和思考。包括这些在内,对不同于传统工业机器人的护理机器人认识的深化,“或许会在其他领域也催生新的创新。这才是开发的意义所在”(高木)。如上所述,拥有固有特点的护理机器人还可能会成为催生新要素技术的平台。
“抱感”舒适的传感器开发
让我们回到上文提到的(1)~(3)的要点,下面来看一下与之相关的开发案例及需求等的案例。
(1)作为考虑到与人的物理接触的柔软电子部件开发案例,有东海橡胶工业开发出了“全橡胶”柔软触觉传感器。这是由该公司与理化学研究所设立的“理研-东海橡胶人类共存机器人合作中心”(RTC)2011年8月发布,为护理机器人“RIBA-Ⅱ”(图4)开发的。
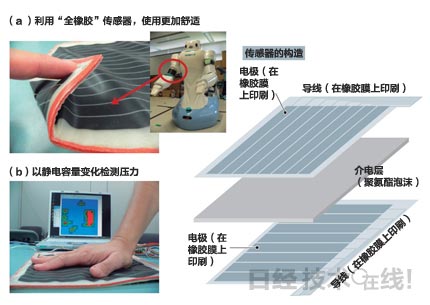 |
| 图4:开发橡胶静电容量型触觉传感器 理化学研究所与东海橡胶开发的“RIBA-Ⅱ”以与人接触的机器人为前提,开发出了全部用橡胶构成的触觉传感器,可在机器人身上随处利用(a)。该传感器可检测应变造成的静电容量变化(b)。东海橡胶考虑2012年内将该传感器投产用于其他用途。(图根据东海橡胶的资料制作) |
RIBA-Ⅱ具有把患者从地板上抱到轮椅上的功能。以前的试制品采用原来的半导体传感器,为了使抱起时更舒适,新开发了柔软的传感器,配备在了机器人的手臂和胸部。利用该传感器可以测量被护理者的体重,并可由触觉操作机器人。
新开发的传感器采用三明治构造,用印有电极的2片橡胶膜将聚氨酯介电层夹在中间。原理是在受到外力变形时,可检测到电极间的静电容量变化以把握压力。“作为橡胶制静电容量型触觉传感器,是全球首创技术”(东海橡胶工业新事业开发研究所健康护理事业准备室室长郭士杰)。
实际上,除护理机器人外,东海橡胶工业还预定2012年12月前后推出采用此技术的体压检测传感器。并且,还在推进防褥疮垫等用途广泛的开发。在2012年9月底举行的“第39届国际福利设备展”上,这些展示成了热点话题。可以说,这是护理机器人作为新要素技术开发平台的一个好例子。